CCTagマーカーを使ってみた
はじめに
#今回は画像認識用のマーカーの一種であるCCTagについて紹介します。
CCTagはC/C++で実装されたライブラリです。
ロボットと画像認識は切っても切り離せない関係にあり、近年では画像認識により自律的に動作したり、周囲の様子を把握して移動するロボットが多く登場してきています。
画像認識には様々な技術がありますが、画像認識を補助するマーカーを用いる事で対象の位置姿勢を推測する手法はよく見受けられます。
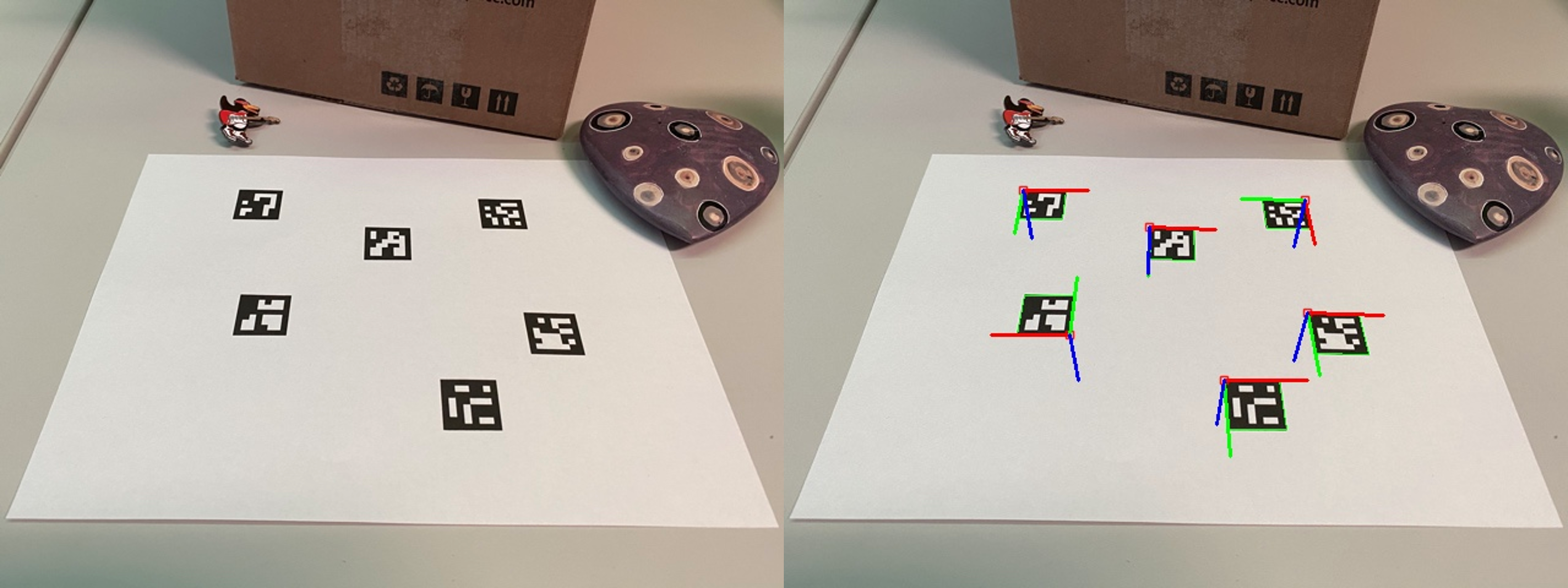
有名な3次元位置姿勢を推定できるマーカーとして、OpenCVのArUcoマーカーがあります。
単一のArUcoマーカーで3次元の位置および姿勢を推定することが出来ます[1]。
CCTagとは
#CCTagを使用することで、以下のような複数の円で構成される2次元マーカーを検出する事が出来ます。
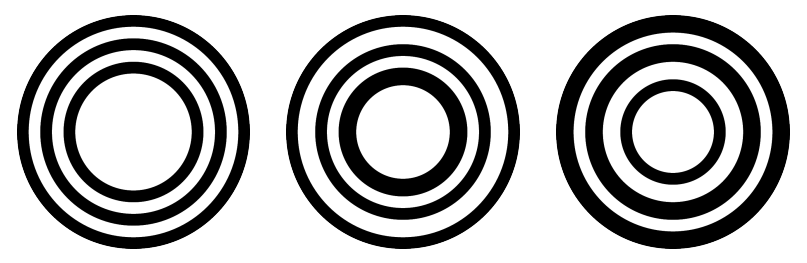
先ほど紹介したArUcoマーカーとは異なり、CCTagマーカーは2次元の位置しか推定できません。
その代わり一般的なマーカーでは認識困難な環境下でもマーカーの認識ができるようです[2]。
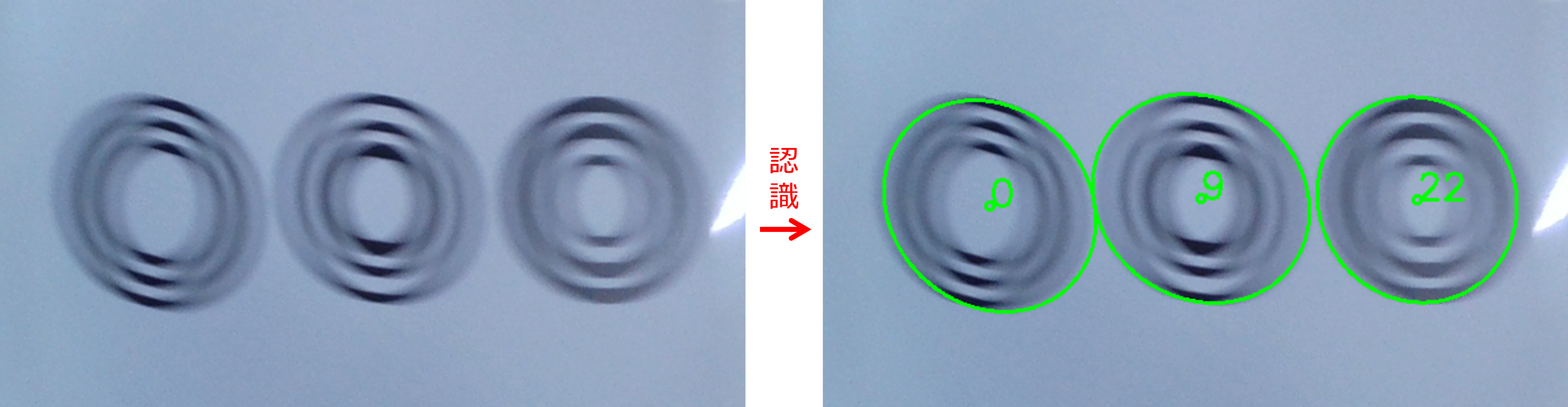
認識困難な例として、マーカー・カメラの移動や焦点のズレによる画像のぼやけ、照明環境の変化による画像の明るさの変化等が考えられます。
従って環境変化の大きい屋外で動作するロボットや、カメラの画像がブレやすい移動ロボットの画像認識に向いていそうです。
上記シーンには該当しませんが、私は屋内において固定されたロボットと3Dセンサとのハンド-アイキャリブレーション[3]の精度検証に使用しました。
使用できるプログラム言語は現時点ではC++のみであり、ライセンスはMPL2.0です。
CCTagの導入
#推奨スペックは以下の通りです。
| 項目 | 推奨スペック |
|---|---|
| OS | Windows x64, Linux, macOS |
| CPU | 比較的最近のIntelかAMD CPUであれば |
| メモリ | 8GB以上 |
| GPU | CUDAが利用できるGPU (compute capability 3.5以上) |
CCTagはCPU、GPUどちらにも対応しております。
CUDAが無い場合や高速な認識が必要ない場合はCPUのみで使う事が出来ます。
以下、Ubuntuを想定した環境構築手順を説明していきます。
依存ライブラリのバージョンは以下のとおりです。
- Eigen3 >= 3.3.4
- Boost >= 1.66
- OpenCV >= 3.1
- TBB >= 2021.5.0
まずは依存ライブラリをインストールしていきます。
sudo apt-get install g++ cmake git-all libpng-dev libjpeg-dev libeigen3-dev libboost-all-dev libopencv-dev
TBBにつきましては、私の環境Ubuntu20.04ではapt-get installによるインストールだとバージョンが古いのでソースコードからインストールしました。
git clone https://github.com/oneapi-src/oneTBB.git
cd oneTBB
mkdir build
cd build
cmake -DCMAKE_BUILD_TYPE=Release ..
make
sudo make install
Ubuntu22.04だと以下のようにapt-get installで十分なようです。
sudo apt-get install libtbb-dev
CCTagのソースコードをクローンし、インストールしていきます。
git clone https://github.com/alicevision/CCTag.git
cd CCTag
mkdir build
cd build
CUDAを利用しなくて良い場合は、以下のようにCCTAG_WITH_CUDAオプションをOFFにしてcmakeしてください。
デフォルトはONです。
cmake -DCMAKE_BUILD_TYPE=Release -DCCTAG_WITH_CUDA=OFF ..
make
sudo make install
インストール完了です。
マーカーを認識する
#CCTagマーカーを認識する簡単なC++のコードを紹介します。
マーカーの認識にCCTagを、画像の読み込み・表示にOpenCVを使用します。
#include <cctag/CCTag.hpp>
#include <opencv2/opencv.hpp>
void drawMarkers(const boost::ptr_list<cctag::ICCTag>& markers, cv::Mat& image);
int main(int argc, char** argv)
{
// マーカーを撮影した画像を読み込み
const std::string IMG_PATH{"../cctags-detection-scene.png"};
cv::Mat imageRgb = cv::imread(IMG_PATH, 1);
if (imageRgb.empty()) {
std::cerr << "'" << IMG_PATH << "' was not found." << std::endl;
return 1;
}
cv::Mat imageGray;
cv::cvtColor(imageRgb, imageGray, cv::COLOR_BGR2GRAY);
// (1) マーカーのパラメータを設定
const std::size_t NUM_CROWNS{3};
cctag::Parameters params(NUM_CROWNS);
// (2) マーカーを認識
boost::ptr_list<cctag::ICCTag> markers{};
cctag::cctagDetection(markers, 0, 0, imageGray, params);
// 認識結果を描画
drawMarkers(markers, imageRgb);
// 認識結果の表示
cv::imshow("Result", imageRgb);
// 何らかのキーを押したら表示終了
cv::waitKey(0);
return 0;
}
void drawMarkers(const boost::ptr_list<cctag::ICCTag>& markers, cv::Mat& image)
{
// 描画パラメータ
const int RADIUS{3};
const int FONT_SIZE{1};
const int THICKNESS{2};
const int FONT_FACE{cv::FONT_HERSHEY_SIMPLEX};
for (const auto& marker : markers) {
// (3) マーカー中心を取得
const auto center = cv::Point(marker.x(), marker.y());
// (4) マーカーの外接楕円の情報を取得
const auto outerEllipse = marker.rescaledOuterEllipse();
// (5) 有効な認識結果かをチェック
const auto isValid = marker.getStatus() == cctag::status::id_reliable;
const auto color = isValid ? cv::Scalar(0, 255, 0) // 緑
: cv::Scalar(0, 0, 255); // 赤
cv::circle(image, center, RADIUS, color, THICKNESS);
cv::putText(image,
std::to_string(marker.id()),
center,
FONT_FACE,
FONT_SIZE,
color,
THICKNESS);
if (isValid) {
// (6) マーカー外郭を描画
cv::ellipse(image,
center,
cv::Size(outerEllipse.a(), outerEllipse.b()),
outerEllipse.angle() * 180. / CV_PI,
0,
360.,
color,
THICKNESS);
}
}
}
今回はOpenCVの関数の説明は省略させていただきます。
// (1) マーカーのパラメータを設定
cctag::Parametersでマーカーのパラメータを設定しています。
ただ設定できるのはマーカーの輪の数が3つか4つか指定できる程度です。
// (2) マーカーを認識
cctag::cctagDetection()でマーカーを認識します。
認識結果はmarkers{}に格納されます。
// (3) マーカー中心を取得
cctag::ICCTag型のmarkerに対し、marker.x()でマーカー中心のX座標、marker.y()でマーカー中心のY座標を取得できます。
他にもmarker.id()でマーカーのIDを取得できます。
// (4) マーカーの外接楕円の情報を取得
cctag::ICCTag::rescaledOuterEllipse()を使用し、外接楕円の情報をcctag::numerical::geometry::Ellipse型のellipseとして取得します。
// (5) 有効な認識結果かをチェック
marker.getStatus()がstatus::id_reliableの場合は有効な検出結果と判断されます。
今回の場合は1つのマーカーにつき3つの輪が検出されなければ有効でないと判断されます。
// (6) マーカー外接楕円を描画
ellipse.a()で楕円の長径の長さ、ellipse.b()で楕円の短径の長さ、ellipse.angle()で楕円の回転角度を取得できます。
他、APIのリファレンスはこちら以下をご覧ください。
コードをコンパイルするためにcmakeを使用します。
先ほどのコードをmain.cppとし、これをコンパイルするためのCMakeLists.txtを書きます。
cmake_minimum_required(VERSION 3.16)
project(CCTagSample)
find_package(OpenCV REQUIRED)
find_package(CCTag REQUIRED)
add_executable(cctag_sample main.cpp)
target_link_libraries(cctag_sample PRIVATE ${OpenCV_LIBRARIES} CCTag::CCTag)
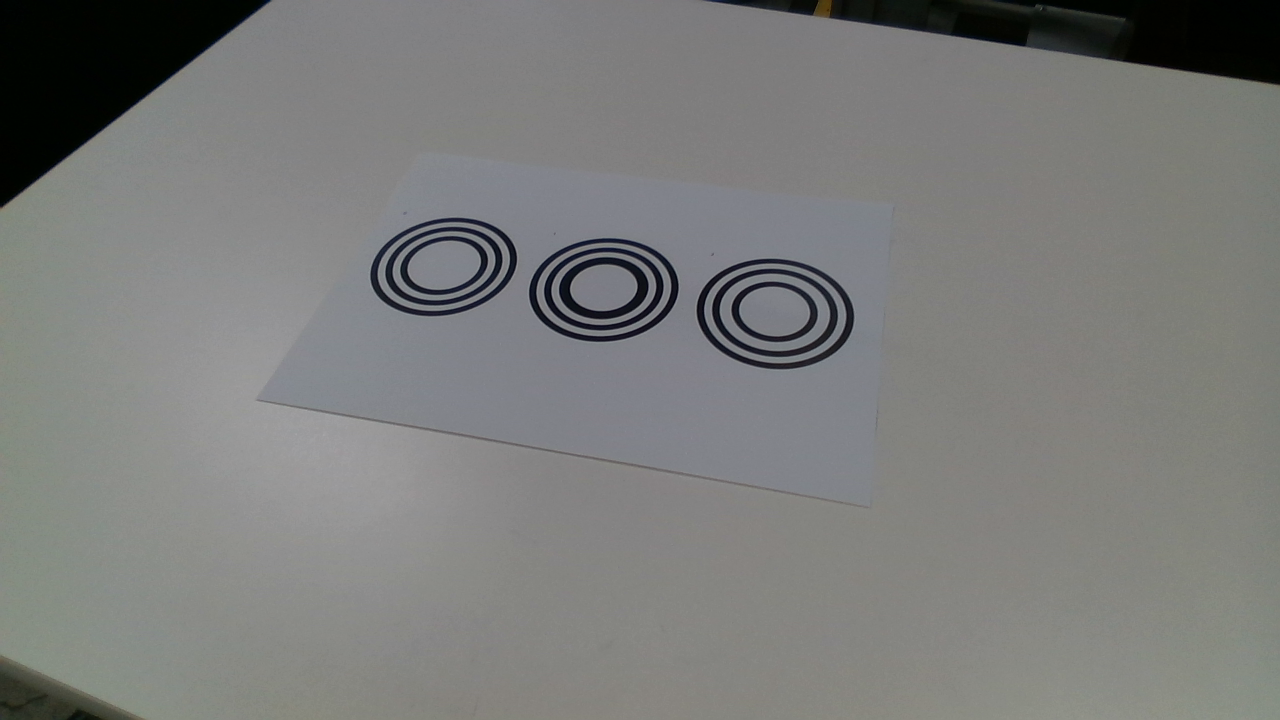
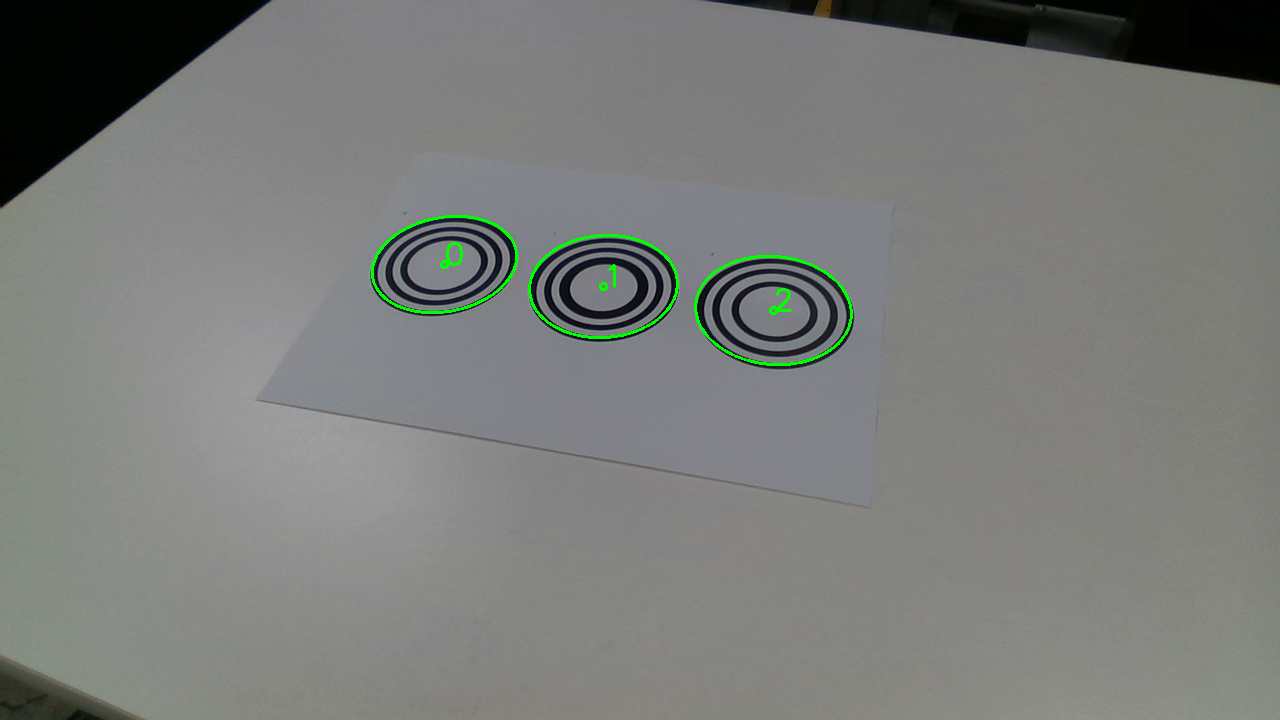
cctags-detection-scene.pngは以下の画像を使用します。
任意のディレクトリにて、以下のようにファイルを配置します。
.
├── CMakeLists.txt
├── cctags-detection-scene.png
└── main.cpp
コンパイルして実行してみます。
mkdir build
cd build
cmake -DCMAKE_BUILD_TYPE=Release ..
make
./cctag_sample
以下のように画像が表示されれば成功です。
マーカー画像の生成
#マーカーの描画や出力に必要なライブラリをインストールします。
sudo apt install libcairo2-dev
pip install pycairo rlPyCairo svgwrite svglib
CCTagの導入でクローンしたCCTagリポジトリにマーカー画像を生成するスクリプト、generate.pyが置いてあります。
cd CCTag
cd markersToPrint/generators
./generate.py
generate.pyを実行することで、SVG形式でマーカーが出力されます。
オプションを指定することでPNGやPDF形式で出力したり、マーカーの大きさを変更することが出来ます。
例えば、直径500[pix]で、マーカーにIDを追記し、PNG形式にて出力したい場合は以下のように実行します。
./generate.py --radius 500 --addId --generatePng
使い方および他のオプションは以下の通りです。
usage: generate.py [-h] [--rings N] [--outdir dir] [--margin N] [--radius N] [--addId] [--addCross] [--generatePng] [--generatePdf] [--whiteBackground]
optional arguments:
--rings N マーカーの輪の数 (3か4のみ指定可、デフォルトは3)
--outdir dir 出力先のパスを指定 (デフォルトは"./")
--margin N マーカーの周囲の余白[pix] (デフォルトは400)
--radius N マーカーの直径[pix] (デフォルトは500)
--addId マーカー左上にIDを追記
--addCross マーカー中心にクロスマークを追記
--generatePng PNGファイルも出力
--generatePdf PDFファイルも出力
--whiteBackground 背景を透過ではなく白色にする
生成したマーカーを紙や他媒体に印刷して使用してください。
おわりに
#今回は少し珍しいマーカー検出ライブラリ、CCTagを紹介しました。
CCTagマーカー単体では3次元位置姿勢を検出できませんが、最低3つのマーカーを組み合わせてその配置情報を利用すれば3次元位置姿勢も求める事ができます。
ArUcoマーカーでは認識が安定しないような困難な環境にてマーカー認識が必要となった場合等に、ぜひCCTagを使用してみてください。
今回の記事は公式のドキュメントを元に作成しておりますので、更に詳細を知りたい方は確認してみてください(こちら)。
ロボットとカメラの間の位置姿勢のキャリブレーション ↩︎